
Friday 1 June 2012
Android 4.0
Android 4.0 Highlights Summary
New User Features:
Official Android 4.0 Logo
- Refined, evolved UI – Common action more visible, new typeface, improved multitaksing and notifications.
- Home screen folders and favorites tray – New home screen folders offer a new way for users to group their apps and shortcuts logically.
- Resizable widgets – Interactive widgets are resizable, so users can expand them to show more content or shrink them to save space
- New lock screen actions – The lock screens now let users do more without unlocking such as accessing the camera app.
- Quick responses for incoming calls – Respond by pre-written SMS if you are busy during a call
- Swipe to dismiss notifications, tasks, and browser tabs
- Improved text input and spell-checking – The softkeyboard now comes with a spell-checker and can automatically correct typos.
- Powerful voice input engine – Talk to write SMS.
ANDROID NDK JNI OUTPUT

codename | platform | API | kernel |
eclair | 2.0, 2.0.1, 2.1 | 5,6,7 | |
froyo | 2.2,2.2.1 | 8 | 2.6.32,2.6.32.9 |
gingerbread | 2.3 | 9 | 2.6.35 |
2.3.3 | 10 | ||
2.3.4 | 10 | 2.6.35.7 | |
honeycomb | 3.0 | 11 | 3.0.0 |
3.1 | 12 | ||
Ice cream Sandwich |
After a long working experience on working with SDK, i switched on to Android NDK. My wish has been to deploy any JNI on ARM9(v4) with the android 1.5 running on it.
This will be done if i could get NDK-r1 , but right now not available .
This was not possible as the android running on the board is 1.5 my JNI is compatible for >v4 (ARM11) i tried couple of days to get set the environment ,.... at last i made NDK environment set up, thanks to the climate in Hyderabad,.. which has made me stuck @ home.
Ok no waiting check the NDK outputs and the debug info on Logcat ...
What an experience to view how ANDROID gets booted up and hand full tool to debug the emulator and hardware connected if any..
These are the outputs.......even though its the sample lets check it out.....................
android NDK cygwin ubuntu JNI
x86 Qtopia to clear all doubts on Qtopia setup

Hello Everyone, who views my blog and often mail regarding my posts.
After getting so many queries regarding Qtopia on X86/ARM/.... and on different Platforms. So i decided topost a topic on Qtopia also which i did a long back.
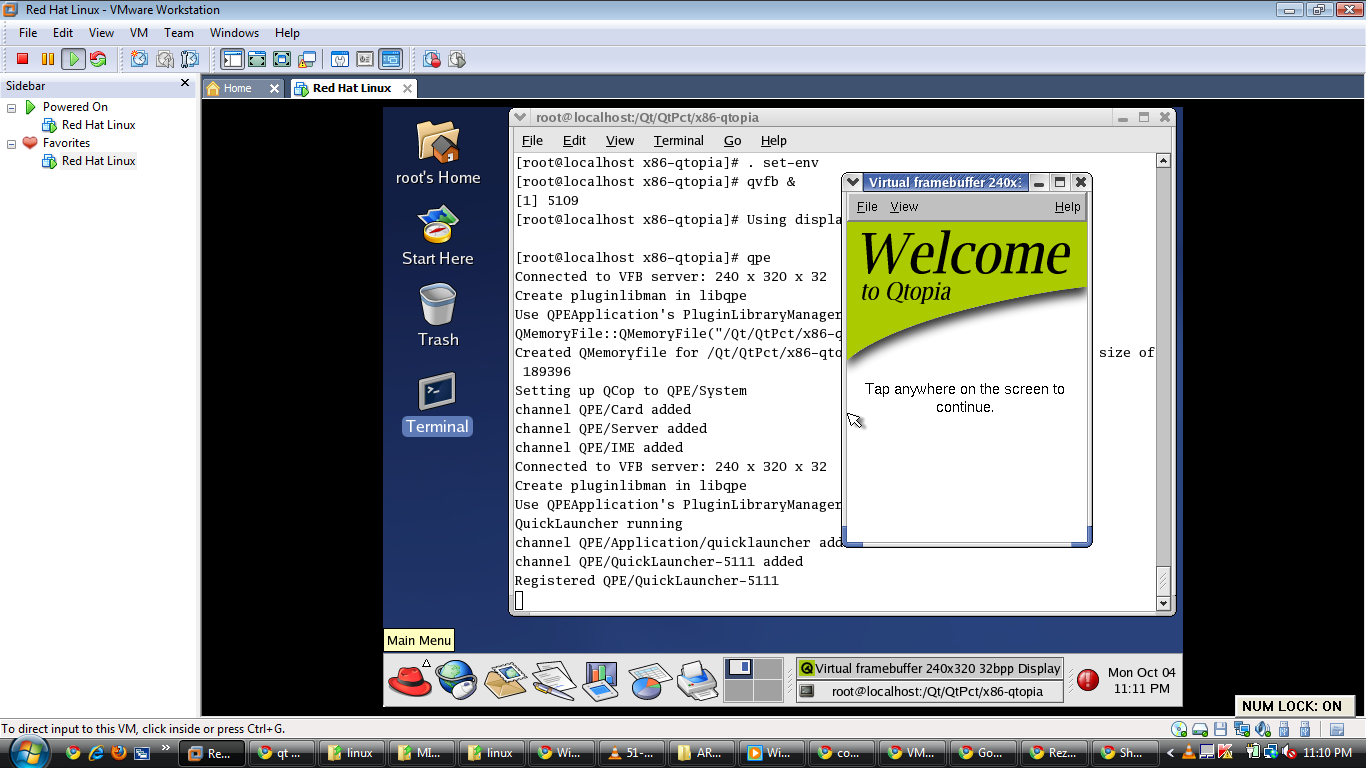
This post is for people who want to setup x86 Qtopia and try out there own apps.
Today im posting QTOPIA X86 setup, and Output.
SETUP REQUIRMENTS:
OS: RED HAT LINUX 9.0.
GNU TOOLS: GCC 3.3.2 (which can be verified by gcc -v at terminal command prompt)
x86 Qtopia Tool: x86-qtopia.tar.gz (size 36M) don't be confused by x86-qtopia.tgz this another version. In this post only x86-qtopia.tar.gz
From here on very simple.
Cross-compilation parameters
#!/usr/bin/bash
#Packages list
#atk-1.26.0.tar.bz2 expat_2.0.1.orig.tar.gz glib-2.21.5.tar.bz2 gtk-doc-1.11.tar.bz2 librsvg-2.22.3.tar.bz2 poppler-0.10.7.tar.gz
#cairo-1.8.2.tar.gz fontconfig-2.5.91.tar.gz gst-plugins-base-0.10.23.tar.bz2 hicolor-icon-theme-0.10.tar.gz libxml2-sources-2.6.31.tar.gz SHA256SUMS-for-bz2
#dbus_1.2.16.orig.tar.gz freetype-2.3.6.tar.bz2 gstreamer-0.10.23.tar.bz2 jpegsrc.v7.tar.gz pango-1.24.5.tar.bz2 tslib_1.0.orig.tar.gz
#DirectFB-1.3.0.tar.gz gettext-0.16.tar.gz gtk+-2.16.6.tar.bz2 libpng-1.2.38.tar.bz2 pixman-0.12.0.tar.gz
# Step 1: Build Glib
#************Important**********************************************#
# you need to check your cross compiling toolchain to find whether
# there is an underscore before symbols, for example:
# cat >test.c <<"EOF"
# int test(){}
# EOF
#Packages list
#atk-1.26.0.tar.bz2 expat_2.0.1.orig.tar.gz glib-2.21.5.tar.bz2 gtk-doc-1.11.tar.bz2 librsvg-2.22.3.tar.bz2 poppler-0.10.7.tar.gz
#cairo-1.8.2.tar.gz fontconfig-2.5.91.tar.gz gst-plugins-base-0.10.23.tar.bz2 hicolor-icon-theme-0.10.tar.gz libxml2-sources-2.6.31.tar.gz SHA256SUMS-for-bz2
#dbus_1.2.16.orig.tar.gz freetype-2.3.6.tar.bz2 gstreamer-0.10.23.tar.bz2 jpegsrc.v7.tar.gz pango-1.24.5.tar.bz2 tslib_1.0.orig.tar.gz
#DirectFB-1.3.0.tar.gz gettext-0.16.tar.gz gtk+-2.16.6.tar.bz2 libpng-1.2.38.tar.bz2 pixman-0.12.0.tar.gz
# Step 1: Build Glib
#************Important**********************************************#
# you need to check your cross compiling toolchain to find whether
# there is an underscore before symbols, for example:
# cat >test.c <<"EOF"
# int test(){}
# EOF
Porting uClinux to ARMulator (www.embeddedsoftwarelabs.com)
Host Complier: arm-elf-gcc version 2.95.3
ftp://fr2.rpmfind.net/linux/fedora/releases/9/Everything/i386/os/Packages/gcc-c++-4.3.0-8.i386.rpm for (c++)
Build Complier: gcc version 4.3.0 20080428
ftp://fr2.rpmfind.net/linux/fedora/releases/9/Everything/i386/os/Packages/gcc-4.3.0-8.i386.rpm for (C)ftp://fr2.rpmfind.net/linux/fedora/releases/9/Everything/i386/os/Packages/gcc-c++-4.3.0-8.i386.rpm for (c++)
OS : Open Suse 9.x
Install toolchain :
[root@localhost raju]# ./arm-elf-tools-20040427.sh
run ./arm-elf-tools-20040427.sh
[root@localhost raju]# arm-elf-gcc -v
Reading specs from /usr/local/lib/gcc-lib/arm-elf/2.95.3/specs
gcc version 2.95.3 20010315 (release)(ColdFire patches - 20010318 from http://fiddes.net/coldfire/)(uClinux XIP and shared lib patches from http://www.snapgear.com/)
Install uclinux
http://opensrc.sec.samsung.com/download/linux-2.6.5-hsc2.patch.gzhttp://www.kernel.org/pub/linux/kernel/v2.6/linux-2.6.5.tar.bz2
Decompression uclinux:
[root@localhost raju]# tar zxvf uClinux-dist-20040408.tar.gz
[root@localhost raju]# cd uClinux-dist
Remove all linux kernel patch, waiting for kernel implanted linux2.6.5
[root@localhost uClinux-dist]# rm linux-2.* -rf
To prepare for the linux kernel linux2.6.5
ARM7 Frame buffer on S3C44B0X(www.embeddedsoftwarelabs.com)

uClinux PORT to S3C44B0X
S3C44B0X is a ARM7 16/32-bit RISC microprocessor is designed to provide a cost-effective and high performance
micro-controller solution for hand-held devices and general applications. To reduce total system cost, S3C44B0X
also provides the following: 8KB cache, optional internal SRAM, LCD controller, 2-channel UART with handshake, 4-
channel DMA, System manager (chip select logic, FP/ EDO/SDRAM controller), 5-channel timers with PWM, I/O
ports, RTC, 8-channel 10-bit ADC, IIC-BUS interface, IIS-BUS interface, Sync. SIO interface and PLL for clock.
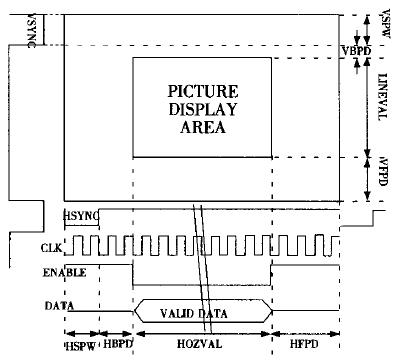
Great thing here on S3C44B0X is that it has LCD Controller in built.
So it will b easy to interface with LCD, In this case we have interfaced to Panasonic L78C64 7" panel.
Feature of LCD Controller
· Supports color/monochrome/gray LCD panel
· Supports single scan and dual scan displays
· Supports virtual screen function
· System memory is used as display memory
· Dedicated DMA for fetching image data from
system memory
· Programmable screen size
· Gray level: 16 gray levels
· 256 Color levels
For More other details plz refer to User manual of the Processor.
ARM Linux Kernel Boot Requirements(www.embeddedsoftwarelabs.com)
Kernel and Device Drivers
The Linux kernel itself is very portable and configurable. In fact, porting Linux to new hardware can take less time than the equivalent task using an RTOS when the board's CPU type and serial port device is already supported by the core kernel. Once the kernel is up and running, device drivers can be tested. Many devices already have device drivers for Linux, even if they aren't distributed with the core kernel. The modular architecture of the kernel and its well designed internal mechanisms mean that device drivers are often usable on architectures other than those for which they were originally designed. The key point here is that investing effort in writing Linux kernel device drivers correctly yields device support for a number of different platforms when Linux is used on each of those platforms.
Some companies are understandably reluctant to write device drivers for a single operating system. Instead, they prefer to add a level of abstraction between the driver code and OS to enable a different OS to be used without altering the driver code. The same aim can be achieved by writing the core code of the device driver as a set of ANSI C, non-blocking functions which handle all of the low-level hardware accesses. These functions present a C API to the device. Then, an OS-specific driver is written which calls the common ANSI C routines. However, even this method still has its drawbacks.
what is uClinux?(www.embeddedsoftwarelabs.com)
Hi Friends
Come to the World of Embedded Systems in which lot of things are there where u guys can Do lot of activity and develop applications.
Now just get into the chip. The name ‘uClinux’ comes from ‘Micro(μ)-Controller Linux’.
Here we go , Putting it simple uClinux is Linux 2.x kernel intended for micro-controllers without Memory Management Units (MMUs).Today's uClinux as an operating system includes Linux kernel releases for 2.0 2.4 and 2.6 as well as a collection of user applications, libraries and tool chains.
uClinux was first ported to the Motorola MC68328 DragonBall Integrated Microprocessor. Since then, uClinux has grown exponentially, as more and more MMU-less chips receive their own ports.
Ported Microcontrollers and Microprocessors
* Motorola DragonBall (M68EZ328), M68328, M68EN322, ColdFire, QUICC (Quad Integrated Communications Controller)
* ARM7TDMI
S3c4510B Samsung micro-controller.
Come to the World of Embedded Systems in which lot of things are there where u guys can Do lot of activity and develop applications.
Now just get into the chip. The name ‘uClinux’ comes from ‘Micro(μ)-Controller Linux’.
Here we go , Putting it simple uClinux is Linux 2.x kernel intended for micro-controllers without Memory Management Units (MMUs).Today's uClinux as an operating system includes Linux kernel releases for 2.0 2.4 and 2.6 as well as a collection of user applications, libraries and tool chains.
uClinux was first ported to the Motorola MC68328 DragonBall Integrated Microprocessor. Since then, uClinux has grown exponentially, as more and more MMU-less chips receive their own ports.
Ported Microcontrollers and Microprocessors
* Motorola DragonBall (M68EZ328), M68328, M68EN322, ColdFire, QUICC (Quad Integrated Communications Controller)
* ARM7TDMI
S3c4510B Samsung micro-controller.
Embest AX4510B Board Details
Embest AX4510B Board Details:
Embest AX4510 EVB for S3C4510B is a platform that is suitable for code development of Samsung's S3C4510B (ARM7TDMI) RISC microcontroller (General ARM) for network applications and general applications.
The S3C4510B is based on 16/32-bit ARM7TDMI RISC processor. It offers a configurable 8K-byte unified cache/SRAM and Ethernet controller which reduces total system cost. Important peripheral functions include two HDLC channels with buffer descriptor, two UART channels, 2-channel GDMA, two 32-bit timers, and 18 programmable I/O ports. On-board logic includes an interrupt controller, DRAM /SDRAM controller, and a controller for ROM/SRAM and flash memory. The System Manager includes an internal 32-bit system bus arbiter and an external memory controller.
Embest AX4510 EVB for S3C4510B is a platform that is suitable for code development of Samsung's S3C4510B (ARM7TDMI) RISC microcontroller (General ARM) for network applications and general applications.
The S3C4510B is based on 16/32-bit ARM7TDMI RISC processor. It offers a configurable 8K-byte unified cache/SRAM and Ethernet controller which reduces total system cost. Important peripheral functions include two HDLC channels with buffer descriptor, two UART channels, 2-channel GDMA, two 32-bit timers, and 18 programmable I/O ports. On-board logic includes an interrupt controller, DRAM /SDRAM controller, and a controller for ROM/SRAM and flash memory. The System Manager includes an internal 32-bit system bus arbiter and an external memory controller.
Development Tools for uClinux on Embest AX4510 (S3C4510B microcontroller)(www.embeddedsoftwarelabs.com)
Hardware Tools:
Null Modem Cable for PPP connection between board and PC, and this board will work fine on Windows OS.
Software Tools:
OS: Any Linux flavour i'm using Redhat Linux 9.x i386 with 2.4.20-8 Kernel, this can be referred at the time of booting.
Null Modem Cable for PPP connection between board and PC, and this board will work fine on Windows OS.
Software Tools:
OS: Any Linux flavour i'm using Redhat Linux 9.x i386 with 2.4.20-8 Kernel, this can be referred at the time of booting.
uClinux compilation on RedHat Linux(Porting uclinux)(www.embeddedsoftwarelabs.com)
Follow the steps as it is: Create a new directory using mkdir command (usage example: mkdir newlinux) and make it as root user and owner.
1.
Download arm-elf-tools-20030314.sh
2.
The implementation of the script to complete the installation of cross compiler
./arm-elf-tools-20030314.sh
That is
[admin @ localhost admin] $ ./arm-elf-tools-20030314.sh
3.
Test, enter arm-elf-gcc -v in terminal to see the version.
[admin @ localhost admin] $ arm-elf-gcc-v
1.
Download arm-elf-tools-20030314.sh
2.
The implementation of the script to complete the installation of cross compiler
./arm-elf-tools-20030314.sh
That is
[admin @ localhost admin] $ ./arm-elf-tools-20030314.sh
3.
Test, enter arm-elf-gcc -v in terminal to see the version.
[admin @ localhost admin] $ arm-elf-gcc-v


Mini2440 Kernel port linux-3.3.2
Mini2440 Linux kernel port
Soc: S3C2440 ARM 9
CC: arm-linux-gcc
Work done at embeddedsoftwarelabs.com/training.htmlOutput Screen Shots of Kernel / OS Port :
Below video is for Linux kernel OS port on ARMV7 , DM37XX.
Subscribe to:
Posts (Atom)